This section describes the formulation of the quadrilateral
finite-membrane-strain element S4R, the triangular element S3R and S3 obtained through degeneration of S4R, and the fully integrated finite-membrane-strain element S4.
At a given stage in the deformation history of the shell, the position of a
material point in the shell is defined by
where the subscript i and other Roman subscripts range
from 1 to 3. Subscripts
and other lowercase Greek subscripts which describe the quantities in the
reference surface of the shell range from 1 to 2. In the above equation
is the normal to the reference surface of the shell. The gradient of the
position is
where we have neglected derivatives of
with respect to .
Note that in the above
are local surface coordinates that are assumed to be orthogonal and distance
measuring in the reference state.
is the coordinate in the thickness direction, distance measuring and orthogonal
to
in the reference state. The thickness increase factor
is assumed to be independent of .
In the deformed state we define local, orthonormal shell directions
such that
where
is the Kronecker delta and is the identity
tensor of rank 2. Summation convention is used for repeated subscripts. The
in-plane components of the gradient of the position are obtained as
where we have introduced the reference surface deformation gradient
and the reference surface normal gradient
In the original (reference) configuration we denote the position by
(
for the reference surface) and the direction vectors by
,
which yields
The gradient of the position is
and the in-plane components of the gradient are obtained as
where we have assumed that the in-plane direction vectors follow from the
surface coordinates with
and defined the original reference surface normal gradient,
The original reference surface normal gradient is obtained in the finite
element formulation from the interpolation of the nodal normals with the shape
functions. In the deformed configuration it is not derived from the nodal
normals but is updated independently based on the gradient of the incremental
rotations.
Parametric interpolation
The position of the points in the shell reference surface is described in
terms of discrete nodal positions with parametric interpolation functions
.
The functions are
continuous, and
are nonorthogonal, nondistance measuring parametric coordinates. For the
reference surface positions one, thus, obtains
The gradients of the position with respect to
are
Note that uppercase Roman superscripts such as I denote
nodes of an element and that repeated superscripts imply summation over all
nodes of an element.
Now consider the original configuration. The unit normal to the shell
reference surface is readily obtained as
Subsequently, we define two orthonormal tangent vectors
and distance measuring coordinates
along these vectors. The derivatives of these coordinates with respect to
follow from
The gradient of
with respect to
is readily obtained by inversion:
which makes it possible to obtain the gradient operator
The original reference surface normal gradient is obtained from the nodal
normals
with
Since the original reference surface normal gradient is obtained by taking
derivatives with respect to orthogonal distance measuring coordinates, we will
call
the original curvature of the reference surface.
Membrane deformation and curvature
It is convenient to define the inverse of the reference surface deformation
gradient
With this expression we can define the gradient operator in the current
state:
The gradient operator in the current state can also be defined as the
derivative with respect to distance measuring coordinates
along the base vectors ,
since
and, hence,
Hence, it is possible to write for the :
since
In an incremental analysis we can also define the incremental deformation
tensor
and its inverse
With a local coordinate system defined in the current state, the current
gradient of the normal can be transformed into the curvature of the surface:
Orientation update
The equations given in the earlier sections are valid for any local
coordinate system defined in the current state. The
vectors at the beginning of the analysis are determined following the standard
Abaqus
conventions. In this section, we outline the way in which the in-plane
coordinates are made corotational.
To obtain the updated version of ,
we follow a two-step approach. First, we construct orthogonal vectors
tangential to the surface (following
Abaqus
conventions). Subsequently, we calculate
We then apply an in-plane rotation
to the vectors: :
where
is to be determined such that the resulting deformation tensor is symmetric, as
From this follows
Thus, we can calculate the updated local material directions as
Curvature change
We assume that the nodal spin will be interpolated with the interpolation
functions .
During an increment the nodal spin is assumed to be constant; consequently, the
value of the spin at each material point will be constant. Hence, we can use
the same interpolation functions for the incremental finite rotation vector
:
The finite rotation vector can be split in a rotation amplitude
and a rotation axis :
To rotate the shell normal, we use quaternion algebra. The incremental nodal
rotation is represented by the rotation quaternion ,
which is defined by
An updated shell normal is then obtained according to
This updated shell normal does not actually have to be calculated: it is
used only for the derivation of the expression for the curvature change. It is
not equal to the shell normal used at the start of the next increment
,
which will again be chosen perpendicular to the reference surface. The updated
normal used here will be approximately orthogonal to the reference surface,
depending upon the amount of transverse shear deformation. The gradient of the
updated shell normal can be obtained by differentiation:
The second term on the right-hand side can be written in the form
Hence, the scalar parts of the first two terms cancel each other and the
vector parts reinforce each other, leading to
The inverse of a rotation quaternion such as
is equal to its conjugate ().
Hence, we can write
where we have formally defined the incremental gradient update vectors
which must be expressed in terms of the gradient of the incremental
rotation. From the definition of the incremental quaternion
follows
thus, for ,
again with use of the incremental quaternion definition
From the definition of
and follows
After substitution in the expression for
and some algebra one obtains
Note that
when .
For the gradient
of the updated shell normal we obtain
where we have introduced the two-dimensional alternator
:
Note that the change in
is independent of .
Calculation of
involves taking the gradient with respect to the reference configuration. It is
more convenient to use the reference surface curvature tensor
We then introduce the incremental curvature update vectors
which makes it possible to write the update equation as
This expression makes it feasible to calculate the update in the reference
surface curvature by taking gradients in the latest updated state only.
Deformation gradient
We already have obtained an expression for the deformation gradient in the
reference surface, and we have assumed that the thickness change is constant:
At other points in the shell we obtain for the in-plane component
We neglect terms of order ,
which yields the simplified relation
We can write this as the product of a finite-membrane deformation and a
bending perturbation:
It will be assumed that the deformation (strain and rotation) due to bending
is small and, therefore,
Membrane strain increment
The membrane strain increment follows from the incremental stretch tensor
, whose
components follow from the incremental deformation gradient
by the polar decomposition .
Let
and
be the deformation gradient at the beginning and the end of the increment,
respectively. By definition .
The incremental deformation gradient follows as
Since
are the components of an orthogonal matrix, the square of the incremental
stretch tensor can be obtained by
(see
Deformation).
The logarithmic strain increment is then
and the average material rotation increment is defined from the polar
decomposition:
Due to the choice of the element basis directions, it follows that
Curvature increment
Following Koiter-Sanders shell theory, and compensating for the rotation of
the base vectors relative to the material, we define the physical curvature
increment
as
Neglecting terms of the order
relative to ,
this expression can be rewritten as
where use was made of the curvature update formula. Observe that the
curvature at the beginning of the increment, ,
does not appear in this equation. Hence, there is no need to calculate the
initial curvature ,
and we can assume .
The deformation gradient can, hence, also be simplified to
For the material strain increment at a point through the shell thickness
Koiter-Sanders theory thus yields
Virtual work
The virtual work contribution of the stresses is
We assume that the variations in the strain can be expressed in terms of
variation in membrane strain and curvature with the same relations as apply to
the increment in strain:
which transforms the virtual work equation into
We introduce the membrane forces
and the bending moments :
which allows us to write
The membrane strain variation follows with the usual expression
where we have used the identity .
The variation in the curvature is obtained by taking variations in the
incremental curvature, which yields
We neglect the terms of order
and also terms of order ,
which yields
We evaluate
with respect to the current state (at the end of the increment). Hence for the
evaluation we can assume .
Moreover, we neglect terms of the order
since they are proportional to .
Hence, we obtain
which substituted in the expression for
yields
The rate of virtual work
To obtain an expression for the rate of virtual work, we first write the
virtual work equation in terms of the reference volume
where
is the Kirchhoff stress tensor, related to the Cauchy or true stress tensor via
The rate of change then becomes
Here
indicates that the rates are taken in a material, corotational coordinate
system. The terms involving stress rates are related to the material behavior.
We assume constitutive equations of the form
Substituted in the expression and
transformed back to the current configuration, this yields
Consistent with the derivation of the virtual work equation itself, we
neglect terms of the order .
Hence, the rate of virtual work can be written as
Second variation of the membrane strain
It remains to determine
and .
From the first variation
follows
Since
is the inverse of ,
it follows that
Substitution in the expression for the second variation yields
The corotational rate of the base vectors follows from
Substituted in the first term of the previous expression yields
The in-plane components of the corotational rate of the base vectors can
also be expressed in terms of the in-plane material spin in the reference
surface:
Substitution in the last obtained expression for
yields
This expression is identical to the one obtained with “standard” continuum
elements.
Second variation of the curvature
We need to calculate the second variation of the curvature to calculate the
initial stress contribution from the curvature:
To simplify the computation, we rely on the intrinsic definition of
curvature and express the curvature in derivatives with respect to the
isoparametric coordinates. Accordingly,
where the bending resultant components
are the components expressed in the orthonormal coordinate system
()
transformed by .
Denoting derivatives with respect to the isoparametric coordinates as
,
the second variation of the curvature is
Using the fact that
and ,
we find that
Here
indicates the skew-symmetric tensor with axial vector .
Transverse shear treatment
Several interpolation schemes have been proposed to avoid shear-locking,
which typically arises as the thickness of a plate or shell goes to zero. Here
we employ an assumed strain method based on the Hu-Washizu principle. This
scheme derives from that by
MacNeal
(1978), subsequently extended and reformulated in
Hughes
and Tezduyar (1981) and
MacNeal
(1982) and revisited in
Bathe
and Dvorkin (1984). Computational aspects of the nonlinear theory are
investigated in
Simo,
Fox, and Rifai (1989) for fully integrated quadrilateral shell elements.
For reduced integration quadrilateral and triangular shell elements that can be
used for both implicit and explicit integration, this assumed strain method
needs to be modified. We summarize below the assumed strain method used with
fully integrated elements, followed by the modifications required for the
one-point integration plus stabilization used in
Abaqus.
Construction of the assumed strain field
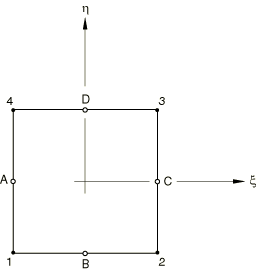
Consider a typical isoparametric finite element, as depicted in
Figure 1,
and denote by
the set of midpoints of the element boundaries.
Figure 1. Notation for the assumed strain field on the standard isoparametric
element.
The following assumed transverse shear strain field is used:
where
are the covariant transverse shear strains evaluated at the midpoints of the
element boundaries. In the above transverse shear strain definitions, the use
of uppercase letters indicates quantities in the reference configuration and
the use of lowercase letters indicates the deformed configuration. For
readability we have omitted the subscript 3 from the director field. Making use
of the bilinear element interpolation, it follows that
where ,
for ,
are the reference surface position vectors of the element nodes.
By making use of the assumed strain field along with the update formulae for
the director field, the assumed covariant transverse shear field can be written
concisely in matrix notation. Recall the director field update equation and the
corresponding linearized director field:
It follows from the element interpolation that
Define the following vectors:
Then, the linearized transverse shear strain is
where
Define the four vectors:
Then the rotation or bending part of the strain/displacement operator is
written
Constitutive relations
A St. Venant-Kirchhoff constitutive model for the Kirchhoff curvilinear
components of the resultant transverse shear force is written in terms of the
transverse shear strains as
where
is the transverse shear stiffness in curvilinear coordinates. For a single
isotropic layer,
The matrix
is the inverse of the metric ,
where metric components in the reference configuration
are defined by the inner product
The Cauchy or true transverse shear force components in the shell
orthonormal coordinate system
are calculated with the coordinate transformation
as
where A is the element's reference area and
a is the current area.
Initial stress stiffness
The calculation of the initial stress stiffness matrix requires the second
variation of the assumed transverse strain field. This calculation can be
summarized in matrix notation as follows. Define vectors of variations of the
nodal displacement quantities:
Then the initial stress contribution is written
where
is the area measure in the current configuration and
is the (symmetric) transverse shear contribution to the initial stress, defined
as follows. Let be the
identity matrix; then define the symmetric matrices
Also define the skew-symmetric matrices
Also, let be the
zero matrix. Then
is written
One point integration plus stabilization
For reduced-integration elements the transverse shear force components need
to be evaluated at the center of the elements. Consider
the transverse shear contribution to the internal energy:
The reference area measure
is written in terms of the isoparametric coordinates as
,
where
and
are the components of the reference surface metric in the undeformed
configuration.
This transverse shear energy can be approximated in many ways to produce a
one point integration at the center of the element plus hourglass
stabilization. It is important that this treatment yield accurate
representation of transverse shear deformation in thick shell problems and
provide robust performance for skewed elements. The treatment should collapse
smoothly to a triangle, which should be insensitive to the node numbering
during collapse; that is, the triangle's response should not depend on the
nodal connectivity. For an entire mesh of triangular elements, the treatment
should give convergent results (that is, the element should not lock).
Furthermore, the high frequency response of the transverse shear treatment
should be controlled so that transverse shear response does not dominate the
stable time increment for explicit dynamic analysis (including for skewed
triangular or quadrilateral geometries). All of these requirements are embodied
in the following transverse shear treatment.
Define the transverse shear strain at the center of the element (the
homogeneous part) and the “hourglass” transverse shear strain vectors as
The element distortion coefficients
and
are constants determined by the element reference geometry. For geometries with
constant Jacobian transformation, .
The components of the hourglass strain vector
are defined in terms of the edge strains as
The coefficients ,
,
,
and
are constants determined from the reference geometry of the element. For
rectangular elements ,
,
,
and
can be identified as the strain associated with the rotational “butterfly”
deformation pattern. We call
the “crop circle” mode strain since it corresponds to a deformation pattern
that resembles the sweeping over the element normals in a circular pattern.
The inclusion of the crop circle strain
in the homogeneous part of the transverse shear strain
has two important consequences. First, it makes the transverse shear response
insensitive to the nodal connectivity for a triangular element. That is, when a
side of a quadrilateral element is collapsed to form a triangle, the element's
response is independent of the choice of node numbering on the element. Second,
for explicit dynamic analyses the coefficients
and
are chosen to minimize the highest frequencies associated with the homogeneous
part of the transverse shear response.
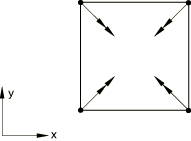
To illustrate the crop circle and butterfly transverse shear patterns,
consider a square, initially flat element. Furthermore, consider plate theory
kinematics; that is, two rotations and a vertical deflection at the nodes. The
crop circle pattern has zero vertical deflection at the nodes and a nodal
rotation vector pattern as illustrated in
Figure 2.
Figure 2. Crop circle pattern: zero deflection and circularly symmetric
rotations.
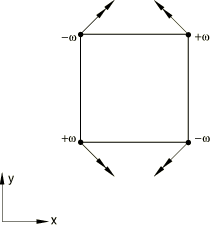
The butterfly pattern has vertical deflections that correspond to
cross-diagonal bending; that is, two equal deflections at two nodes across a
diagonal, with equal and opposite deflections at the remaining two nodes. The
nodal rotations develop in a way that opposes the bending motion of the
reference surface; that is, the rotations are opposite the rotations that would
develop for this displacement pattern to produce pure bending. The butterfly
mode's nodal vertical deflection and rotation vector pattern are illustrated in
Figure 3.
Figure 3. Butterfly pattern: vertical deflection and rotation vectors.
Let the reference element area be .
The transverse shear energy can be approximated as a center point value plus a
stabilization term:
where
is the transverse shear stiffness evaluated at the center of the element and
the hourglass stiffness is the diagonal
matrix
The effective stiffness
is the average direct component of the transverse shear stiffness,
.
The formulation of the homogeneous part of the transverse shear has two
contributions: the average edge strain across the element, plus the element
distortion term. The average strain treatment is essentially the same as that
for the assumed strain formulation of MacNeal and others presented earlier,
with expressions evaluated at the center of the element
(
and ).
The details of this part are omitted; only the element distortion term is
presented in detail. The variation of the homogeneous transverse shear strain
can be written
where
and
are
and
evaluated at the center of the element,
and
The stabilization term has a similar formulation. The variation of the
hourglass strain is
where
and
The hourglass force components
and
are given by the constitutive relations
Comments on stabilization
(1) The butterfly mode
is applied with a “large” or physical hourglass stiffness. For a reference
geometry with constant Jacobian, the butterfly stabilization term can be
derived from an exact integration of the assumed strain formulation of the
transverse shear energy. It is important to apply this constraint with a high
stiffness to prevent overly flexible response for quadrilateral elements. The
crop circle mode is applied with a “small” or weak stiffness. Although this
mode can propagate, it is rarely problematic and is often prevented with
boundary conditions.
(2) As the quadrilateral element is degenerated to a triangle, the two
hourglass constraints converge into a single constraint: the crop circle
constraint. However, as is well-known, for a constant strain triangle the
element will lock for certain meshes with three transverse shear constraints
per element. Therefore, in the case of a triangular element, the (strong)
butterfly mode stabilization is not applied. Only the (weak) crop circle mode
stabilization is applied. Thus, in addition to the two homogeneous transverse
shear strains, the triangle has a weak constraint to prevent spurious zero
energy modes, yet avoids locking in most situations.
The initial stress contribution from the stabilization terms takes the
following form:
where
is the (symmetric) transverse shear stabilization contribution to the initial
stress. Define the symmetric matrices
Also define the skew-symmetric matrices
Then
is written
Note that once the matrix entries in
are defined,
is filled just as .
The initial stress contribution from the homogeneous part consists of two
terms, one from the assumed strain formulation (evaluated at
)
as detailed earlier, and the other from the crop circle mode addition. These
two terms can be written
where
and
are the shear force and matrix
evaluated at the element center. The matrix expression for
is analogous to
from the stabilization terms.
In-plane displacement hourglass control
The in-plane displacement hourglass control is applied in the same way as in
the
Abaqus
membrane elements. The hourglass strains are defined by
where
is the hourglass mode. This mode is obtained by making the “regular” hourglass
mode
orthogonal to the homogeneous deformation mode in the undeformed shape of the
element. This last condition can be written as
Observe that
and consequently
This expression can be worked out further. We define the projected nodal
coordinates
and the projected element area
The hourglass mode can then be written in the form
The hourglass stiffness is chosen equal to
where G is the shear modulus and
is a small number chosen to be 0.005 in
Abaqus/Standard
and 0.05 in
Abaqus/Explicit.
When the hourglass control is based on assumed enhanced strain, the artificial
stiffness factor is replaced by coefficients derived from a three-field
variational principle. The hourglass force Z conjugate to
z is then equal to
For virtual work we need the first variation of the hourglass strain. From
the expression for the strain follows immediately
Note that the second term vanishes in the initial configuration since
.
The second variation is needed for the Jacobian. From the first variation
follows right away
The second variation does not contribute in the initial configuration since
initially .
Rotational hourglass control
The expressions for the curvature change, the transverse shear constraints,
and the drilling mode constraints still leave three nonhomogeneous rotational
modes unconstrained. These modes correspond to zero rotation at the midedges
and zero gradient at the centroid. Hence, they correspond to the familiar
hourglass pattern. To pass curvature patch tests exactly, it is necessary to
use orthogonalized hourglass patterns as derived for in-plane hourglass
control.
This last aspect implies that the rotational hourglass mode corresponds to
the mixed derivative of the rotation at the centroid:
We cannot use the above formulation directly in a formulation suitable for
multiple finite rotation increments. Hence, we use the same approach as for the
calculation of the curvature change. For the purpose of the calculation we
define the updated shell direction vectors
The updated shell direction vectors do not actually have to be stored: they
are used only for the derivation of the expression for the hourglass strain. We
now formally define the hourglass strain tensor as
Observe that
For the purpose of hourglass strain calculation we assume that all products
of first-order derivatives with respect to
and
can be neglected. Consequently,
and, hence,
is skew-symmetric. Observe that the mixed derivative of
can be expressed in terms of the hourglass strain tensor with
In the undeformed configuration, we assume that .
Subsequent values of
are obtained incrementally. From the expression for
we obtain
In this expression we also ignore all terms with products of derivatives
with respect to
and .
Hence, the above expression simplifies to
The second term on the right-hand side can be written in the form
Hence, the scalar parts of the first two terms cancel each other and the
vector parts reinforce each other, leading to
The inverse of a rotation quaternion such as
is equal to its conjugate ();
hence, we can write
where we have formally defined the incremental hourglass update vector
which must be expressed in terms of the incremental rotation hourglass mode.
From the definition of the incremental quaternion
follows, while neglecting the products of
and
derivatives:
thus, for
again with use of the incremental quaternion definition
From the definition of
and follows, again
neglecting the products of first derivatives
After substitution in the expression for
and some algebra one obtains
Note that
when .
For the updated hourglass tensor one readily obtains
This expression simplifies further with the introduction of the hourglass
vector
which yields the update formula
The first and second variation are obtained in entirely the same way as the
first and second variation of the curvature change. For the first variation we
neglect terms of order
and obtain
For the second variation we ignore in addition the terms of order
and
with as final result
Degenerate elements
In general meshes it will be desirable to collapse at least some of the
quadrilateral elements to triangles or to use the triangular element S3 or S3R, which is in fact an internally collapsed S4R element. For this case the calculation of the membrane strains
and the curvature changes proceeds along the same lines as before. The
transverse shears will now be zero at the degenerate edges. Finally,
calculation of all hourglass constraints will be omitted.
Rotary inertia scaling for explicit dynamics
For numerical efficiency in explicit dynamic analysis, it is desirable to
have the stable time increment determined by the membrane response of the
structure. For this reason scaling of the rotary inertia based on the element's
reference geometry is included in
Abaqus/Explicit.
In explicit dynamic analyses the stable time increment is proportional to
the inverse of the highest frequency of the element. Therefore, we must ensure
that the highest frequency associated with the transverse shear response does
not exceed the highest frequency associated with the membrane response. For
thick elements (that is, for elements whose thickness is order unity relative
to a characteristic length in the element), the membrane frequencies are
dominant. The primary consideration in choosing appropriate scalings is that in
the limit as the element's thickness goes to zero, the transverse shear
frequencies remain below the membrane ones. Recall that for a one-dimensional
spring-mass oscillator, the natural frequency
can be written in terms of the stiffness K and the mass
M as
For the transverse shear response the rotary inertia, which is proportional
to the cube of the thickness, plays the role of the mass of the system. All
other quantities—the membrane stiffness, the mass associated with membrane
deformation, and the transverse shear stiffness—are proportional to the
thickness. Hence as the thickness of the element goes to zero, the frequencies
associated with transverse shear go to infinity proportional to the inverse of
the thickness, while the membrane frequencies remain constant. Without scaling,
the stable time increment would go to zero as the thickness becomes small.
Rotary inertia scaling
For thin elements the rotary inertia is small (negligible) relative to the
rotational inertia of the mass at the nodes rotating about an axis through the
element center. Therefore, we choose a scaling on the rotary inertia such that
it never becomes smaller than a fixed (small) percentage of the rotational
inertia of the mass at the nodes rotating about an axis through the center of
the element.
Let R be the nondimensional rotary inertia scaling,
where .
When ,
the true rotary inertia is used. Consider a lumped mass matrix for a 4-node
element, and let the element be flat and square. For rotations about an axis in
the plane of the element, parallel to an element edge, passing through the
center, the contribution to the rotational inertia of the mass at the nodes is
where A is the area of the element,
L is the characteristic element length, and
is the mass density. The sum of the rotary inertia at the four nodes is
The ratio of the in-plane contribution to the rotary contribution is
For the rotary inertia to remain a fixed fraction—say
—of
the mass contribution as the thickness goes to zero, asymptotically
R must be proportional to ;
that is,
For planar geometries with element directors along the normal direction,
closed-form expressions are possible for the highest membrane and transverse
shear frequencies. In such cases the length parameter L is
interpreted as a characteristic element length that depends on the element
distortion. To handle arbitrarily shaped curved elements, exact calculation of
the element frequencies becomes difficult. However, we can safely bound the
frequencies by an appropriate choice of L in the following
scaling:
where .
For quadrilateral elements the characteristic length,
is,
The factor 16 in the definition of R is used to protect
against bending frequencies determining the stable time increment in very fine
meshes subjected to loads that cause an increase in thickness of the shell.
Rotational bulk viscosity for explicit dynamics
For the displacement degrees of freedom, bulk viscosity introduces damping
associated with volumetric straining. Linear bulk viscosity or truncation
frequency damping is used to damp the high frequency ringing that leads to
unwanted noise in the solution or spurious overshoot in the response amplitude.
For the same reason, in shells we need to damp the high frequency ringing in
the rotational degrees of freedom with linear bulk viscosity acting on the mean
curvature strain rate. This damping generates a bulk viscosity “pressure
moment,” m, which is linear in the mean curvature strain
rate:
where b is a damping coefficient (default = 0.06),
is the original thickness,
is the mass density,
is the current dilatational wave speed, L is the
characteristic length used for rotary inertia scaling, and
is twice the increment in mean curvature. The dilatational wave speed is given
in terms of the effective Lamé's constants as
The resultant pressure moment ,
where h is the current thickness, is added to the direct
components of the moment resultant.
Element S4 is a fully integrated finite-membrane-strain shell element. Since
the element's stiffness is fully integrated, no spurious membrane or bending
zero energy modes exist and no membrane or bending mode hourglass stabilization
is used. Drill rotation control, however, is required. Element S4 uses the same drill stiffness formulation as used for element S4R. Similarly, element S4 assumes that the transverse shear strain (and force, since the
transverse shear treatment is elastic based on the initial elastic modulus of
the material) is constant over the element. Therefore, all four stiffness
integration locations will have the same transverse shear strain, transverse
shear section force, and transverse shear stress distribution. The transverse
shear treatment for S4 is identical to that for S4R.
It is well known that a standard displacement formulation will exhibit shear
locking for applications dominated by in-plane bending deformation. However, a
standard displacement formulation for the out-of-plane bending stiffness is not
subject to similar locking response. Hence, S4 uses a standard displacement formulation for the element's
bending stiffness, and the theory presented above for the rotation kinematics
and bending strain measures applies to S4. The primary difference between the element formulations for S4 and S4R is the treatment of the membrane strain field. This formulation
is the topic of the following discussion.
The membrane formulation used for S4 does not rely on the fact that S4 is a shell element. Hence, the discussion below details the
formulation from the point of view that the membrane response is governed by
the equilibrium for a three-dimensional body in a state of plane stress.
Consider an
enhancement
to the rate of deformation tensor . We introduce the
enhanced rate of deformation tensor, ,
as
where
is defined subsequently.
Admissible variations in the rate of deformation are also introduced as
where
We now introduce constraints on the enhancements and
:
so that the modified virtual work statement can be written in the form
where is the specified
traction on
and on
.
is an arbitrary stress field, and the constitutive equation
()
is enforced pointwise.
In the modified virtual work statement all kinematic quantities and
corresponding variations (,
,
,
and ) are known
functions of ,
, and the
reference configuration. A fundamental requirement for the validity of the
formulation is that the modified virtual work statement leads to the proper
equilibrium equations. If
is arbitrary, the constraint equations can be rewritten as
Substituting these two relations in the modified virtual work equation
yields
where we have used the constitutive equation .
We recognize this variational statement as the usual virtual work equation, and
a straightforward application of the divergence theorem leads to the standard
equilibrium equations.
In the actual implementation we choose to satisfy the constraints only for
piecewise constant stress fields .
Hence, over the element domain
we require
The enhancements
and
are chosen such that they eliminate the shear locking for in-plane bending. In
addition, the direct strain field is enhanced to approximate the strains caused
by Poisson's effect in bending.
Patch test
To pass the patch test, the choice of enhancements
cannot be arbitrary. A sufficient condition for the satisfaction of the patch
test is that for homogeneous deformations we have or
pointwise.
In that case
and the stress is homogeneous. Since the stress is homogeneous, it can be moved
outside the volume integral in the modified virtual work statement. The volume
integral condition on
implies that the expression is independent of the enhancement and leads to the
standard displacement formulation, which is known to satisfy the patch test.