The co-simulation solution technique uses a segregated solution approach in which
your multiphysics or multiscale problem is divided into two or more subsystems, where each
subsystem is solved independently with solution data exchanged during the course of the
analysis. An Abaqus analysis can be coupled to another Abaqus analysis or to another analysis program for solving multiphysics and multiscale
simulations.
Abaqus provides built-in procedures to solve multiphysics simulations as described in Multiphysics Analyses. For multiphysics problems for
which Abaqus does not provide a built-in solution procedure or where the solution procedure is limited
in functionality, you can use the co-simulation solution technique to couple Abaqus with another analysis program; for example, fluid-structure interaction
(FSI) simulation in conjunction with computational fluid
dynamics (CFD) analysis programs.
Co-simulation between Abaqus/Standard and Abaqus/Explicit illustrates a multiple domain analysis approach, where each Abaqus analysis operates on a complementary section of the model domain where it is expected to
provide the more computationally efficient solution. For example, Abaqus/Standard provides a more efficient solution for light and stiff components, while Abaqus/Explicit is more efficient for solving complex contact interactions.
Features of the Abaqus Co-Simulation Solution Technique
The Abaqus co-simulation technique:
can be used to solve complex fluid-structure interactions by coupling Abaqus with the SIMULIA Navier-Stokes solver (available in the Fluid Scenario Creationapp
on the 3DEXPERIENCE platform) or with a third-party CFD solver;
can be used to solve problems involving electromagnetic-thermal or
electromagnetic-mechanical interactions by coupling Abaqus with an electromagnetic analysis program, including electromagnetic analysis
procedures in Abaqus/Standard, CST Studio Suite, or a third-party electromagnetic solver;
can be used to solve general multiphysics simulations by coupling Abaqus with third-party and in-house analysis programs;
can be used to solve complex multidomain analyses more effectively by coupling Abaqus/Standard to Abaqus/Explicit and Abaqus to Simpack;
can be used for system-level modeling between logical and physical components; for
example, coupling Abaqus with Dymola or any Functional Mockup Unit (FMU) using the
FMI 2.0 standard;
uses the SIMULIA Co-Simulation Engine to coordinate the coupled simulation;
is intended for advanced users with in-depth knowledge of Abaqus, the other analysis program, and coupled solution methods;
can be used with Abaqus models having linear or nonlinear structural response; and
supports steady-state and transient procedures and time-harmonic procedures for
electromagnetics.
SIMULIA Co-Simulation Engine
The SIMULIA Co-Simulation Engine (CSE) consists of software components in charge of
coordinating a coupled simulation, including sequential (see General Capability for Importing External Fields), submodeling (see Node-Based Submodeling), and
co-simulation workflows. The SIMULIA Co-Simulation Engine consists of the following:
software services (referred to as SIMULIA
Co-Simulation Services) embedded into the clients (solver applications) and
the SIMULIA Co-Simulation Engine Director in charge of
controlling the coupled simulation.
The SIMULIA Co-Simulation Services (CSS) provide communication,
algorithmic, mapping, transformation, and other services. Data between the clients, and
control messages between the clients and the CSE Director,
are communicated via the TCP/IP sockets. Conservative field
mapping between interface regions having different mesh topologies is performed by the Field
Mapper (see Field Mapper). The transformations services provide
translation and rotation of source and target meshes, unit conversion, and field
operations.
The CSE Director is a separate process that controls the
exchanges between the clients in a coupled simulation. The Director process requires a
CSE Configuration file, which specifies the configuration
of the coupled multiphysics/multiscale problem. It specifies all the participants involved
in the coupled simulation, the data exchange between each client, the coupling algorithmic,
mapper specific settings, and more. The CSE Configuration
File is an XML document that is usually generated by an
authoring tool; typically, you do not need to create or modify it.
Interaction between Domains Modeled with Different Analysis Programs
In a co-simulation the interaction between the numerical domains is through a common
physical interface region over which data are exchanged in a synchronized manner between Abaqus and the coupled analysis programs. When coupling numerical domains to solve a
multiphysics/multiscale problem, you must consider whether the numerical domains overlap or
abut each other in order to define the domain coupling type. Domain coupling types include
point coupling, surface coupling, and volume coupling (see Domain Coupling for Multiphysics and Multiscale Simulations).
One domain can affect the response of another domain through one or more of the following
interactions:
the constitutive behavior, such as the yield stress defined as a function of
temperature or stress defined as a function of other solution fields, such as thermal
strains or the piezoelectric effect;
surface tractions/fluxes, such as a fluid exerting pressure on a structure;
body forces/fluxes, such as Joule heating due to electrical current flow in a coupled
thermal-electrical simulation;
contact forces, such as the forces due to contact between a vehicle and an
occupant/pedestrian modeled as separate domains;
kinematics, such as fluid in contact with a compliant structure where the interface
motion affects the fluid flow; and
discrete coupling, such as sensor and actuation information.
Co-Simulation Workflows with Abaqus
Co-simulation extends the problems that can be solved in Abaqus. It can combine solvers with different numerical methods to solve complex multiphysics
and multiscale problems that otherwise cannot be solved using a monolithic solution
approach. Co-simulation can provide a higher-fidelity solution by adding more complex
interactions, and it can reduce computational time by coupling lower-order models with
3D physical simulations to analyze complex systems. Some
common Abaqus multiphysics and multiscale workflows are illustrated below.
Fluid-Structure Interaction
You can solve complex fluid-structure interaction
(FSI) problems by coupling Abaqus/Standard or Abaqus/Explicit to a computational fluid dynamics (CFD) analysis
program. Abaqus solves the structural domain, and the CFD analysis
program solves the fluid domain. Abaqus can be coupled with the SIMULIA Navier-Stokes solver (available in the Fluid Scenario Creationapp
on the 3DEXPERIENCE platform) or with several third-party CFD analysis programs.
You can solve conjugate heat transfer problems involving fluids and structures by
coupling Abaqus/Standard to a computational fluid dynamics (CFD) analysis
program. Abaqus/Standard models heat transfer within the solid (see Uncoupled Heat Transfer Analysis
and Fully Coupled Thermal-Stress Analysis), and the
CFD analysis program solves the energy equation for the
fluid flow surrounding the structure. Abaqus/Standard can be coupled with the SIMULIA Navier-Stokes solver (available in the Fluid Scenario Creationapp
on the 3DEXPERIENCE platform) or several third-party CFD analysis programs.
Electromagnetic-Thermal or Electromagnetic-Mechanical Coupling
Applications such as induction heating require interaction between electromagnetic and
thermal fields. You can solve this class of problems by coupling Abaqus/Standard with itself, where one analysis solves for the fields in the electromagnetic domain,
while the other solves for the fields in the thermal domain. Alternatively, you can
couple Abaqus/Standard with CST Studio Suite or with several third-party electromagnetic analysis programs.
System-Level Modeling via Logical-Physical Interaction
System-level modeling refers to modeling of systems that can include both physical
(structural, thermal, acoustics, etc.) and logical components modeled via a Function
Mock-up Unit (FMU) using the Functional Mock-up
Interface (FMI). For more information about
FMU and FMI, see http://www.fmi-standard.org.
The distinction between the logical and physical modeling abstractions is as follows:
Logical modeling refers to a large class of modeling abstractions often encountered
in the engineering practice. Generally speaking, you can designate a part of a system
as using a logical modeling abstraction when most (if not all) of the geometry of the
part is removed. Examples include electronic control modules, electric motors, and
pneumatic or hydraulic subsystems, which in many cases can be modeled from a
functional perspective without attempting to model the flow of electrons, the
variation of magnetic fluxes, or the air/fluid type of flow in ducts and pipes. Dymola and other third-party products offer a variety of logical modeling options by
generating FMUs that can be consumed in Abaqus co-simulation.
Physical modeling is the complementary modeling abstraction to logical modeling. Abaqus uses a physical modeling abstraction most of the time; as elements deform, they
know precisely about their geometry, thus trying to mimic the real world at a
fine-grain level.
In many engineering systems the interaction between logical and physical components is
paramount, and you cannot fully analyze one without the other. Co-simulation using Abaqus and FMUs provides the capability to analyze this
type of system.
Consider the example of a rolling mill: the incoming slab, which might not have a
constant thickness, can be modeled in Abaqus as being deformed by the rolling cylinders. Because of the nonconstant incoming
thickness, a pressure that adapts as a function of deformation needs to be exerted on
the cylinders to compensate such that the exit thickness is as constant as possible. Abaqus sensors can export the information about the mechanical status of the system to
FMUs, which in turn could use this information to model
the necessary compensators to calculate the needed actuation load at any given time. Abaqus can import the actuation load and apply it to the cylinders.
In certain cases you can realize significant computational cost savings by partitioning
a model and combining the Abaqus/Standard and Abaqus/Explicit solutions, such as
when the simulation is principally a candidate for Abaqus/Explicit, but where certain parts of the model can be idealized using substructures in Abaqus/Standard, or
when the simulation is principally a candidate for Abaqus/Standard, but where complex contact conditions would be handled more effectively by Abaqus/Explicit.
In certain cases, you might want to consider a Multibody Dynamics Solver to obtain a
cost-effective solution and to introduce a nonlinear part modeled with Abaqus. You can accomplish this by performing a co-simulation between Simpack and Abaqus.
Both the Abaqus/Standard to Abaqus/Explicit and Abaqus to Simpack solutions use highly specialized coupling algorithm to provide robust coupling in a
numerically cost-effective manner.
Coupling Using the MpCCI Interface
MpCCI, the multiphysics code coupling interface developed and distributed by the
Fraunhofer-Institute for Algorithms and Scientific Computing
(SCAI), provides an open system approach for general
multidisciplinary simulations between Abaqus and any third-party analysis program that supports MpCCI. MpCCI provides a scalable communication infrastructure and mapping algorithms for multiple
physics domains. In a co-simulation using MpCCI, Abaqus communicates with the MpCCI coupling server to exchange fields with the third-party analysis program while each
analysis advances its simulation time.
Coupling through MpCCI can occur between Abaqus and any third-party analysis program that supports the MpCCI interface. This includes in-house codes that have the MpCCI adapter embedded. The Fraunhofer-Institute for Algorithms and Scientific Computing
actively supports and qualifies a link between Abaqus and MpCCI, which provides indirect coupling to FLUENT and OpenFoam for fluid-structure interaction. For further information on coupling using
the MpCCI interface, contact https://www.mpcci.de/.
Strength of Physics Coupling and Coupling Algorithms
You typically apply co-simulation techniques to problems where the most complex physics
occurs within domains that are handled exclusively within an analysis. Due to the
comparative numerical simplicity of the numerical techniques applied at the co-simulation
interface, the physics controlling the interaction at the interface of the separate analysis
domains (the strength of the physics coupling) might lead to stability and accuracy
concerns.
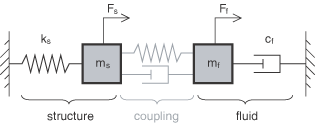
Figure 1 illustrates the
coupling strength with an analogy in the frequency domain. Consider a lumped parameter
dynamic system with a coupling impedance directly related to a response frequency . In a staggered solution approach each domain is solved by temporarily
ignoring the coupling terms represented by the gray spring and dashpot in Figure 1. Figure 1. Mechanical impedance analogy.
When the response frequency and coupling impedance are low, a staggered approach likely
provides adequate solution accuracy and performance. However, when the response frequency is
high (such that the coupling impedance is relatively large compared to the structure or
fluid), you might encounter solution stability issues with the staggered approach.
Analysis domains are coupled in a staggered approach using either a globally explicit
manner or an implicit iterative manner; that is, the equations for each domain are solved
separately, and loads and boundary conditions are exchanged at the common interface. The SIMULIA Co-Simulation Engine supports different coupling schemes that can deliver robust and cost effective solutions
to problems exhibiting different degrees of physics coupling strength.
In cases where the coupling is sufficiently weak, the coupling might be required only in
one direction (such as when an electromagnetic force field contributes to the structural
response, but a reverse coupling provides no significant impact on the electromagnetic
field). A sequential solution approach is the most cost effective solution technique to
solve these problems, although you can also run both solvers concurrently and exchange
solution data in one direction only.
In an explicit staggered approach (such as the Gauss-Seidel coupling scheme), fields are
exchanged only once per coupling step. This coupling strategy is applicable to problems that
exhibit weak to moderate physics coupling (for example, aeroelasticity problems where you
have air interacting with a relatively stiff structure). The explicit staggered approach is
numerically cost effective, but it requires the use of a smaller coupling step size to
obtain a stable and accurate solution.
In an implicit iterative approach, the fields are exchanged multiple times per coupling
step until an overall equilibrium is achieved prior to advancing to the next coupling step.
Implicit coupling is computationally more expensive per coupling step; however, in general,
a larger coupling step size can be employed. Implicit schemes are appropriate for problems
exhibiting moderate to strong physics coupling (for example, blood flow through an artery
were the fluid density ratio between the fluid and solid is near unity, and the fluid is
incompressible); however, this approach is limited to solvers that employ implicit time
integration.
Accelerators can be employed with the implicit iterative approach to enhance the coupling
by enlarging the convergence radius from a stability point of view. The SIMULIA Co-Simulation Engine supports two types of accelerator methods (relaxation technique and Quasi-Newton methods
that approximate an inverse Jacobian at the interface) and can deliver close to an exact
inverse Jacobian if sufficient past residual information is available.
The strength of the physics coupling can generally be greater when coupling two mechanical
systems; for example, Abaqus/Standard to Abaqus/Explicit or Abaqus to Simpack. The SIMULIA Co-Simulation Engine supports coupling algorithms through communication of “right-hand-side” and
“left-hand-side” terms to provide robust interface solutions across a wide range of problem
parameters, which supports both implicit and explicit solvers.
References
For the latest support information and tips on running co-simulations with third-party
analysis programs, see the Dassault Systèmes Knowledge Base at https://support.3ds.com/knowledge-base/.