Center of Gravity | ||
| ||
Parameter Name |
Formula |
|---|---|
CENTER_GRAVITY_X |
|
CENTER_GRAVITY_Y |
|
CENTER_GRAVITY_Z |
Analysis-Independent Design Response
For the center of gravity, the following table shows the allowed combinations
between the strategy and the items OBJ_FUNC and CONSTRAINT
with C for controller and S for sensitivity-based optimization.
TOPO |
SHAPE |
BEAD |
SIZING |
|
|---|---|---|---|---|
OBJ_FUNC |
S |
S |
S |
S |
CONSTRAINT |
S |
S |
S |
S |
The center of gravity for the three directions is defined by CENTER_GRAVITY_X,
CENTER_GRAVITY_Y and CENTER_GRAVITY_Z,
respectively. The center of gravity and the moments of inertia can be
defined as a DRESP (design response) and as a VARIABLE
in the sensitivity-based topology, bead, and sizing optimization. For
controller-based optimization, the center of gravity and the moments of inertia can
only be defined as a VARIABLE which means that the values
can only be used for output or control purposes.
Both the center of gravity and the moments of inertia can be defined
as a design response for the entire structure or for a part of the entire
structure, for example, some specific components. This is done using the command
EL_GROUP.
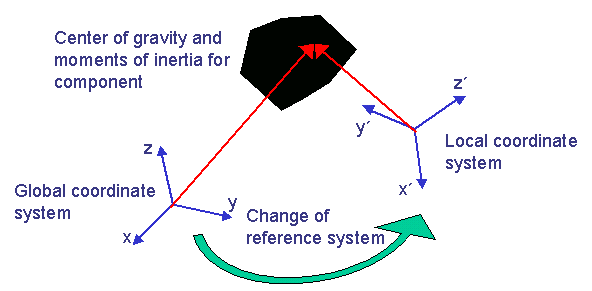
The center of gravity and the moments of inertia are per default calculated
in the global coordinate system. However, the user has the option to
calculate the center of gravity and the moments of inertia in a local
coordinate system. The local
coordinate system is defined in the design response using the command
CS_REF. For the calculation of the center of gravity
both the directions and origin of the local coordinate system is used
as reference whereas for the moments of inertia the directions of the
axes of the local coordinate system is applied, see the following figure.
The global coordinate system is applied if no local coordinate system
is defined in the design response (DRESP). The volume
for which the center of gravity is calculated is defined using EL_GROUP.
 |
Remarks
- Only elements of the element group (
EL_GROUP) listed in the tables of supported element types are applied in the calculation of the center of gravity. - The physical density defined in the finite element input file is used in the calculation for the center of gravity.
- The moments of inertia for shell and membrane elements are calculated as true 3D elements in Tosca Structure using the thickness defined in the properties of the shell and membrane elements in the finite element file. Some finite element solvers and post-processors calculate the moments of inertia for shell and membrane elements as 2D elements without thickness.
- The physical density defined in the finite element input file is used in the calculation for the center of gravity and in the calculation for the moments of inertia.
- Internally, Tosca Structure calculates the center of gravity and the moments of inertia using more digits than can be observed in the finite element input file. A slight difference (<1%) between the center of gravity and the moments of inertia calculated using Tosca Structure and the finite element solver might be present.
- When Tosca Structure calculates the center of gravity and the moments of inertia only the elements shown in the tables of supported element types are included in the calculation. This might lead to a significant difference between the center of gravity and the moments of inertia calculated by Tosca Structure and the center of gravity and the moments of inertia calculated by the finite element solver, for example, if several beam elements are included in the calculation of the center of gravity and the moments of inertia.
- The coordinate system for the center of gravity and the moments of inertia is always interpreted as a Cartesian (rectangular) coordinate system, even if a cylindrical or spherical coordinate system was defined. To get close to a non-Cartesian coordinate system, you can define adequate "box constraints" using several constraints (for example, in x- and y-direction for a cylindrical coordinate system).
Definition
The design response (DRESP) for the center of gravity
in the x-direction is defined like
DRESP
ID_NAME = ...
DEF_TYPE = SYSTEM
TYPE = CENTER_GRAVITY_X
EL_GROUP = ...
CS_REF = ...
END_
where the local coordinate definition (CS_REF) is
optional. Default is the global coordinate system.
The design response (DRESP) for the center of gravity
in the y-direction is defined like
DRESP
ID_NAME = ...
DEF_TYPE = SYSTEM
TYPE = CENTER_GRAVITY_Y
EL_GROUP = ...
CS_REF = ...
END_
where the local coordinate definition (CS_REF) is
optional. Default is the global coordinate system.
The design response (DRESP) for the center of gravity
in the z-direction is defined like
DRESP
ID_NAME = ...
DEF_TYPE = SYSTEM
TYPE = CENTER_GRAVITY_Z
EL_GROUP = ...
CS_REF = ...
END_
where the local coordinate definition (CS_REF) is optional.
Default is the global coordinate system.
Examples of Commands for the Center of Gravity
For example, the design response (DRESP) for the center of
gravity for the y-direction of the entire structure (ALL_ELEMENTS)
calculated in the global coordinate system is defined like
DRESP
ID_NAME = DRESP_COG_Y_GLOBAL
DEF_TYPE = SYSTEM
TYPE = CENTER_GRAVITY_Y
EL_GROUP = ALL_ELEMENTS
END_
For example, the definition of the design response (DRESP) for the center of gravity for the y-direction of the substructure called EL_GROUP_2 is calculated in the local coordinate system number 23 like the following:
DRESP
ID_NAME = DRESP_COG_X
DEF_TYPE = SYSTEM
TYPE = CENTER_GRAVITY_X
EL_GROUP = EL_GROUP_2
CS_REF = CS_23
END_