About the Model
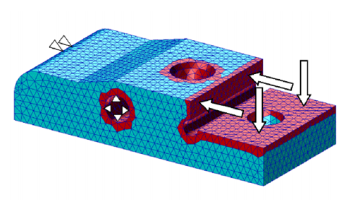
The model in this example refers to a robotic picker arm. The functional surfaces of the picker
arm are loaded with pressure. The picker arm is fixed radially in the middle
cross-bored area.
Procedure Summary
| Model: |
picker_arm.ext |
| Design Area: |
All elements |
| Design Variable Constraint: |
Fix elements of group frozen_elements |
| Constraint: |
Relative volume of 50 % (equality constraint) |
| Objective: |
Maximize stiffness |
| Iterations: |
15 (default) |
| Run: |
Smooth with target volume 0.5 |
| Post-Processing: |
Optimization progress (element density) |