LINK_TOPO | ||
| ||
ID_NAME |
= < |
Name of the link condition. |
TYPE |
Type of the link condition. |
|
= |
Point symmetry referring to the origin of the coordinate system. |
|
= = = |
Plane symmetry referring to the plane which lies perpendicular to the given axis of the coordinate system. |
|
= = = |
Rotational symmetry referring to the axis of the coordinate system. The angle for the repeating segments might be defined by the user. |
|
= = = |
Cyclic symmetry definition. |
|
= |
Coupling of single element groups. |
|
CS |
= < |
Name of the coordinate system that should be used for the link definitions. |
IGNORE_FROZEN |
= FALSE = TRUE |
The frozen elements might be excluded from the link definitions. |
ANGLE |
= < |
Angle for the segment repeating. Must be greater than 2°. |
TRANSLATION |
= < |
Translation amount for the segments. |
GROUP_MAIN |
= < |
Name of the element group that defines the reference segment. |
CS_CHILD |
= < |
Name of the coordinate system that defines the position of the corresponding segment referring to the |
MAIN |
= AUTO |
|
= MAX |
The maximum value of the equivalent elements defines the symmetry. |
|
= AVG |
The average value of the equivalent elements defines the symmetry. |
|
= GROUP |
The reference group overwrites the child groups. |
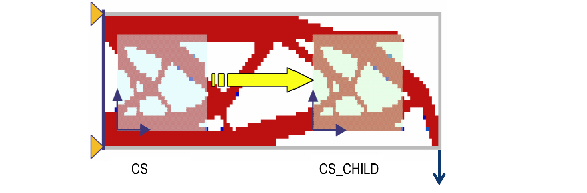
The following figure shows the definition of CS_CHILD for TYPE=LINK_SYM:
 |
Special items for CLIENT parameters
Not all entries are allowed for each parameter as shown in the following table:
POINT_SYM |
PLANE_SYM |
ROTATION_SYM |
CYCLIC_SYM |
LINK_SYM |
|
|---|---|---|---|---|---|
ID_NAME |
x |
x |
x |
x |
x |
TYPE |
x |
x |
x |
x |
x |
CS |
x |
x |
x |
x |
x |
IGNORE_FROZEN |
x |
x |
x |
x |
x |
ANGLE |
- |
- |
x |
- |
- |
TRANSLATION |
- |
- |
- |
x |
- |
GROUP_MAIN |
- |
- |
- |
- |
x |
CS_CHILD |
- |
- |
- |
- |
x |
MAIN |
- |
- |
- |
- |
x |
Examples
LINK_TOPO
ID_NAME = PLANE_SYMMETRY
TYPE = PLANE_SYM, AXIS_2
CS = CS_0
END_
LINK_TOPO
ID_NAME = LINK_CONDITION
TYPE = LINK_SYM
CS = CS_0
GROUP_MAIN = EL_MAIN
CS_CHILD = CS_CHILD1
CS_CHILD = CS_CHILD2
END_