Improved residual checks for models with constraints to help convergence in Abaqus/Standard | ||
| ||
Products Abaqus/Standard
Kinematic constraints based on elimination are commonly employed to efficiently model the motion of dependent nodes in terms of independent nodes. A reference node of a rigid body or kinematic coupling commonly receives force contributions from tens or hundreds of dependent nodes. Previously, Abaqus/Standard treated these nodes as typical nodes for convergence checks of residual forces and moments, resulting in excessively tight convergence thresholds that could unnecessarily slow or block convergence. Abaqus/Standard convergence checks for residuals are enhanced to account for the number of dependent nodes associated with each node.
Figure 1 shows an example with “chained” constraints such that nodes 101, 201, and 301 each act as an independent node in at least one constraint and a dependent node in another constraint.
- Nodes 101 and 201 are reference nodes of kinematic couplings, each having 24 dependent nodes (of solid and shell elements not shown in Figure 1).
- Node 16 is an example of the dependent node of the kinematic coupling associated with reference node 101.
- Node 101 acts as a dependent node of a Beam MPC to node 301.
- Node 201 acts as a dependent node of another Beam MPC to node 301.
- Node 301 is a dependent node of a Beam MPC to node 401.
- Node 301 has 50 dependent nodes in total (nodes 101 and 201 directly depend on node 301, and 48 other nodes depend on node 301 through chaining).
- Node 401 has 51 dependent nodes in total (node 301 directly, and 50 other nodes through chaining).
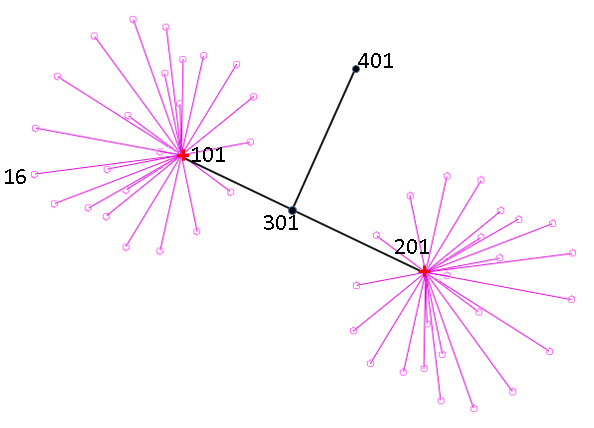
Figure 2 shows the changes to reporting in the message (.msg) file for the nodal residuals in the force and moment fields. For example, the scaled residual moment at the controlling node and the corresponding nodal residual moment at the same node are now reported.

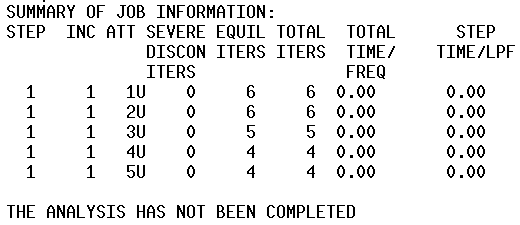
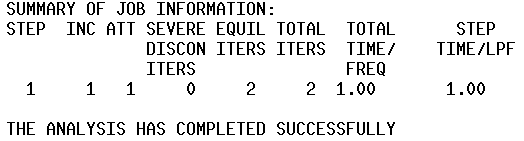
Figure 3 shows the convergence sequence in the status (.sta) file of a typical model struggling to converge. In this case, the model used to cut back as the moment residual tolerances were not satisfied in previous releases. The new residual checks enable convergence, as shown in Figure 4.
Abaqus Analysis Guide
Abaqus Keywords Guide